ML Basics #3: More Layers!
This is the third post in this series on the basics of Machine Learning. These posts are intended to serve as companion pieces to this zine on binary classification. In the last one, we learnt how a Multilayer Perceptron can be trained to non-linearly segment a dataset. We also saw how a simple artificial neuron forms the building block of a Multilayer Perceptron — or a neural network in general — which can learn much more complicated decision boundaries.
Let's move on to datasets that are harder to segment. One way to improve the learning capability of a MLP is to add more neurons in the form of hidden layers. In this post we'll explore MLPs with 2 hidden layers.
Table of Contents
- Setup
- Multilayer Perceptron with 3 layers
- Feedforward
- Error
-
Backpropagation
- Partial derivative wrt prediction
- Partial derivative wrt hidden layer 2 out
- Partial derivative wrt output layer weights
- Partial derivative wrt output layer biases
- Partial derivative wrt hidden layer 1 out
- Partial derivative wrt hidden layer 2 weights
- Partial derivative wrt hidden layer 2 biases
- Partial derivative wrt hidden layer 1 weights
- Partial derivative wrt hidden layer 1 biases
- Decision Boundaries
- References
![]()
Setup¶
!apt-get -q install imagemagick
!pip install -q celluloid
from sklearn.datasets import make_classification, make_circles, make_moons, make_blobs,make_checkerboard
import matplotlib.pyplot as plt
import numpy as np
import pandas as pd
from IPython.display import HTML
import pickle
from math import ceil
from matplotlib.offsetbox import AnchoredText
from celluloid import Camera
def plot_points(X, y, alpha=None):
dogs = X[np.argwhere(y==1)]
cats = X[np.argwhere(y==0)]
plt.scatter([s[0][0] for s in cats], [s[0][1] for s in cats], s = 25, \
color = 'red', edgecolor = 'k', label='cat', alpha=alpha)
plt.scatter([s[0][0] for s in dogs], [s[0][1] for s in dogs], s = 25, \
color = 'blue', edgecolor = 'k', label='dog', alpha=alpha)
plt.xlabel('$x_1$')
plt.ylabel('$x_2$')
plt.legend()
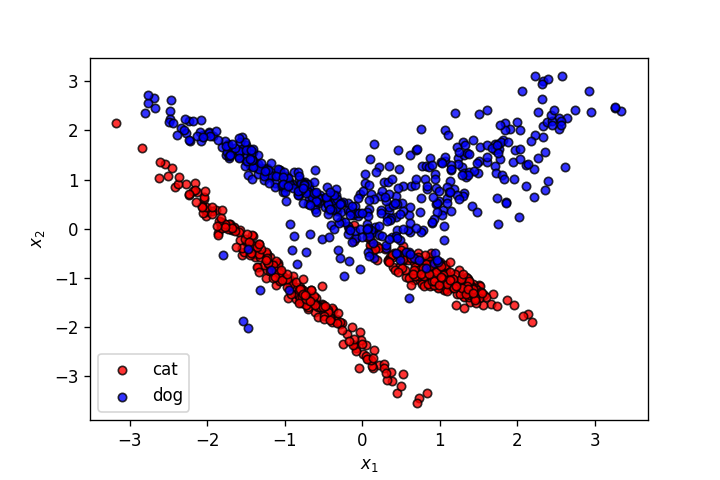
Let's use a new dataset for this exercise.
!wget -q https://gist.githubusercontent.com/dhth/fcd27938c26dbc6124c1c70646a52cfc/raw/2fabb32c1008afefeaf006fcf7602638de0c8699/exor_dataset.csv
data = pd.read_csv('exor_dataset.csv', header=None)
fig = plt.figure(dpi=120)
X = np.array(data[[0,1]])
y = np.array(data[2]).astype(int)
plot_points(X,y)
plt.xlim(X[:,0].min()-0.5,X[:,0].max()+0.5)
plt.ylim(X[:,1].min()-0.5,X[:,1].max()+0.5)
plt.savefig('1.png')
plt.show()
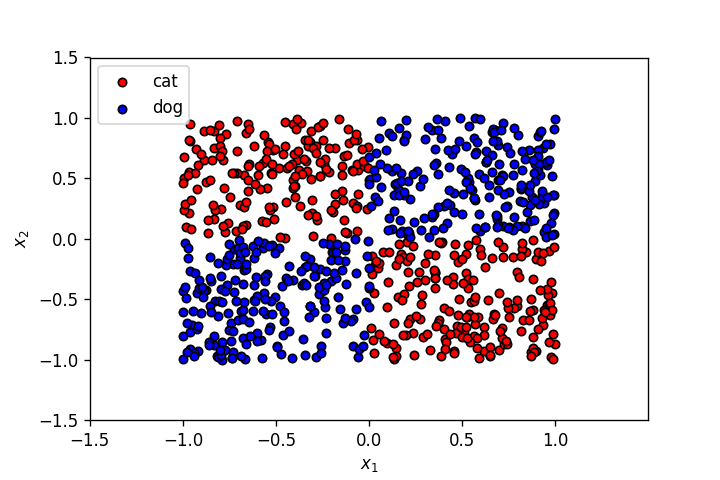
The labels of the points above have an EX-OR relationship with the input features.
Let's start by training the MLP from the last post on this dataset. Copying the same functions from last time:
def sigmoid(x):
return 1/(1+np.exp(-x))
class MLPNeuralNet(object):
def __init__(self,N_input, N_hidden,N_output):
self.weights_input_to_hidden = np.random.normal(0, scale=0.1, size=(N_input, N_hidden))
self.weights_hidden_to_output = np.random.normal(0, scale=0.1, size=(N_hidden, N_output))
self.bias_input_to_hidden = np.zeros(N_hidden)
self.bias_hidden_to_output = np.zeros(N_output)
def feed_forward(self,input_x):
self.hidden_layer_in = np.dot(input_x,self.weights_input_to_hidden) + self.bias_input_to_hidden
self.hidden_layer_out = sigmoid(self.hidden_layer_in)
self.output_layer_in = np.dot(self.hidden_layer_out,self.weights_hidden_to_output) + self.bias_hidden_to_output
self.output_layer_out = sigmoid(self.output_layer_in)
return self.output_layer_out
def get_hidden_layer_in(self,input_x):
return np.dot(input_x,self.weights_input_to_hidden) + self.bias_input_to_hidden
def get_output_layer_in(self,input_x):
self.hidden_layer_in = np.dot(input_x,self.weights_input_to_hidden) + self.bias_input_to_hidden
self.hidden_layer_out = sigmoid(self.hidden_layer_in)
return np.dot(self.hidden_layer_out,self.weights_hidden_to_output) + self.bias_hidden_to_output
def back_propagate(self,input_x,output_y, learn_rate):
error = (-1)*(output_y*np.log(self.output_layer_out) + (1-output_y)*np.log(1-self.output_layer_out))
del_y_out = (-1)*output_y/self.output_layer_out + (1-output_y)/(1-self.output_layer_out)
del_h = del_y_out*self.output_layer_out*(1-self.output_layer_out)*self.weights_hidden_to_output.T
del_w_h_o = del_y_out*self.output_layer_out*(1-self.output_layer_out)*self.hidden_layer_out.T
del_b_o = del_y_out*self.output_layer_out*(1-self.output_layer_out)
del_w_i_h = del_h*self.hidden_layer_out*(1-self.hidden_layer_out)*input_x.T
del_b_h = del_h*self.hidden_layer_out*(1-self.hidden_layer_out)
self.weights_hidden_to_output -= learn_rate*del_w_h_o
self.bias_hidden_to_output -= learn_rate*del_b_o[0,:]
self.weights_input_to_hidden -= learn_rate*del_w_i_h
self.bias_input_to_hidden -= learn_rate*del_b_h[0,:]
return error
def train(nn, features, outputs, num_epochs, learn_rate, print_error=False):
for e in range(num_epochs):
for input_x, output_y in zip(features, outputs):
input_x = input_x.reshape(1,-1)
output_y = output_y.reshape(1,-1)
output_layer_out = nn.feed_forward(input_x)
error = nn.back_propagate(input_x,output_y,learn_rate=learn_rate)
if print_error:
if e%200==0:
print(error[0][0])
def display_linear_boundary(ax, m, b, x_1_lims,x_2_lims,color='g--',label=None,linewidth=3.):
ax.set_xlim(x_1_lims)
ax.set_ylim(x_2_lims)
x = np.arange(-10, 10, 0.1)
ax.plot(x, m*x+b, color, label=label,linewidth=linewidth)
ax.set_yticklabels([])
ax.set_xticklabels([])
return ax
def plot_points_on_ax(ax,X, y,alpha):
dogs = X[np.argwhere(y==1)]
cats = X[np.argwhere(y==0)]
ax.scatter([s[0][0] for s in cats], [s[0][1] for s in cats], s = 25, \
color = 'red', edgecolor = 'k', label='cats',alpha=alpha)
ax.scatter([s[0][0] for s in dogs], [s[0][1] for s in dogs], s = 25, \
color = 'blue', edgecolor = 'k', label='dogs',alpha=alpha)
return ax
def create_decision_boundary_anim(nn,X,y,epochs=300,learn_rate=1e-3,snap_every=100,dpi=100,print_error=False, num_cols=2):
hidden_units = nn.weights_hidden_to_output.shape[0]
num_subplots = 1 + hidden_units
num_rows = ceil(num_subplots/num_cols)
fig,axes = plt.subplots(num_rows, num_cols, figsize=(num_cols*3,num_rows*3),dpi=dpi)
axes_list = list(axes.flat)
for ax in axes.flat:
ax.set_yticklabels([])
ax.set_xticklabels([])
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
final_dec_boundary_ax = axes_list[0]
hidden_layer_ax = axes_list[1:hidden_units+1]
camera = Camera(fig)
h = .02
x_min, x_max = X[:, 0].min() - 0.5, X[:, 0].max() + 0.5
y_min, y_max = X[:, 1].min() - 0.5, X[:, 1].max() + 0.5
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
for e in range(ceil(epochs/snap_every)):
train(nn,X,y,snap_every,learn_rate,print_error=print_error)
Z = (nn.feed_forward(np.c_[xx.ravel(), yy.ravel()]) >0.5).astype(int)
Z = Z.reshape(xx.shape)
final_dec_boundary_ax.contourf(xx, yy, Z, cmap=plt.cm.RdBu)
text_box = AnchoredText(f'Epoch: {snap_every*(e+1)}', frameon=True, loc=4, pad=0.5)
plt.setp(text_box.patch, facecolor='white', alpha=0.5)
final_dec_boundary_ax.add_artist(text_box)
Z_hidden = (nn.get_hidden_layer_in(np.c_[xx.ravel(), yy.ravel()]) >=0.).astype(int)
for i,ax in enumerate(hidden_layer_ax):
Z_ = Z_hidden[:,i].reshape(-1,1)
Z_ = Z_.reshape(xx.shape)
ax.contourf(xx, yy, Z_, cmap=plt.cm.RdBu)
camera.snap()
final_dec_boundary_ax = plot_points_on_ax(final_dec_boundary_ax,X, y,alpha=.6)
final_dec_boundary_ax.set_title(f'Decision boundary of MLP')
for i,ax in enumerate(hidden_layer_ax):
ax = plot_points_on_ax(ax,X, y,alpha=.6)
ax.set_title(f'Hidden neuron {i+1}')
plt.annotate('https://dhruvs.space', xy=(1, 0), xycoords='axes fraction', fontsize=9,
xytext=(0, -15), textcoords='offset points',
ha='right', va='top')
plt.tight_layout()
animation = camera.animate()
return animation
np.random.seed(10)
nn = MLPNeuralNet(2, 3, 1)
anim = create_decision_boundary_anim(nn,X,y,\
epochs=300,dpi=40,\
learn_rate=5e-2,snap_every=50,\
print_error=True)
plt.close()
HTML(anim.to_html5_video())

The gif above shows the decision boundaries of the MLP as a whole, as well as those of the hidden neurons. As evident from it, this MLP with a single hidden layer is having a hard time segmenting this dataset. It can be achieved — with proper weight initialisation, adding custom input features ($x_1\times x_2$), and by making use of other activation functions — but that's not the point here. An MLP with a single hidden layer will eventually prove to be insufficient as the complexity of the dataset increases. Let's add another layer of hidden neurons to this MLP, and see if that helps.
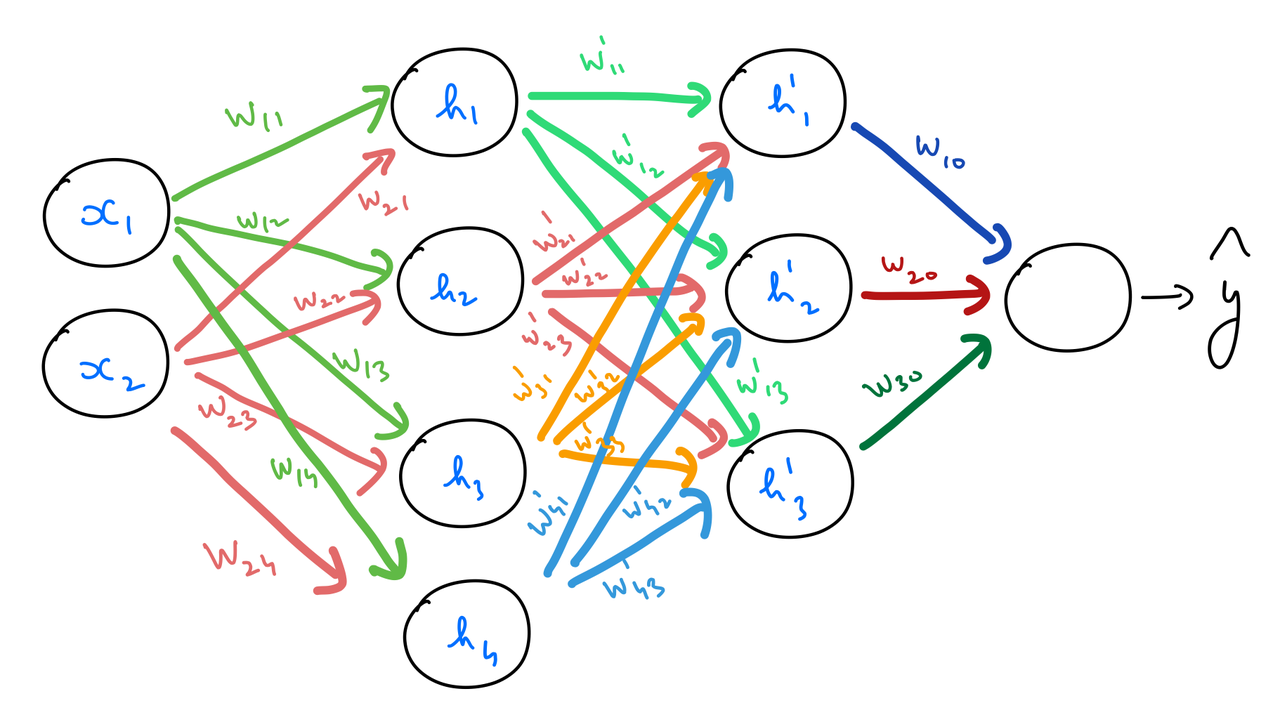
Multilayer Perceptron with 3 layers¶
The following is a MLP with 2 hidden layers.
Feedforward¶
Let's go through the process step by step, as before.
input_x = X[0,:].reshape(1,-1)
output_y = y[0].reshape(1,-1)
input_x.shape, output_y.shape
N_input = 2
N_hidden_1 = 4
N_hidden_2 = 3
N_output = 1
This time we'll initialize the weights in a different way. We'll randomly select values from a normal distribution and then multipy them by the factor: $$ \large \sqrt{\frac{2}{\text{outputTensor.shape[1]}}} $$
I'll get into the reasoning behind this kind of initialization in an upcoming post. This approach is called Xavier initialisation. More details about this approach can be found here and here.
We'll be needing 3 sets of weights this time.
weights_input_to_hidden_1 = np.random.randn(N_input, N_hidden_1)*np.sqrt(1/N_hidden_1)
weights_input_to_hidden_1
weights_hidden_1_to_hidden_2 = np.random.randn(N_hidden_1, N_hidden_2)*np.sqrt(1/N_hidden_2)
weights_hidden_1_to_hidden_2
weights_hidden_2_to_output = np.random.randn(N_hidden_2, N_output)*np.sqrt(1/N_output)
weights_hidden_2_to_output
We need 3 sets of biases as well. $$ \large \text{biasHidden1} =\begin{bmatrix} b_{1}&b_{2}&b_{3}&b_{4} \end{bmatrix} $$
bias_input_to_hidden_1 = np.zeros(N_hidden_1)
bias_input_to_hidden_1
bias_hidden_1_to_hidden_2 = np.zeros(N_hidden_2)
bias_hidden_1_to_hidden_2
bias_hidden_2_to_output = np.zeros(N_output)
bias_hidden_2_to_output
The difference this time is that we need to perform one more set of calculations — for both feedforward, and backpropagation stages — corresponding to the added hidden layer.
Hidden 1 out¶
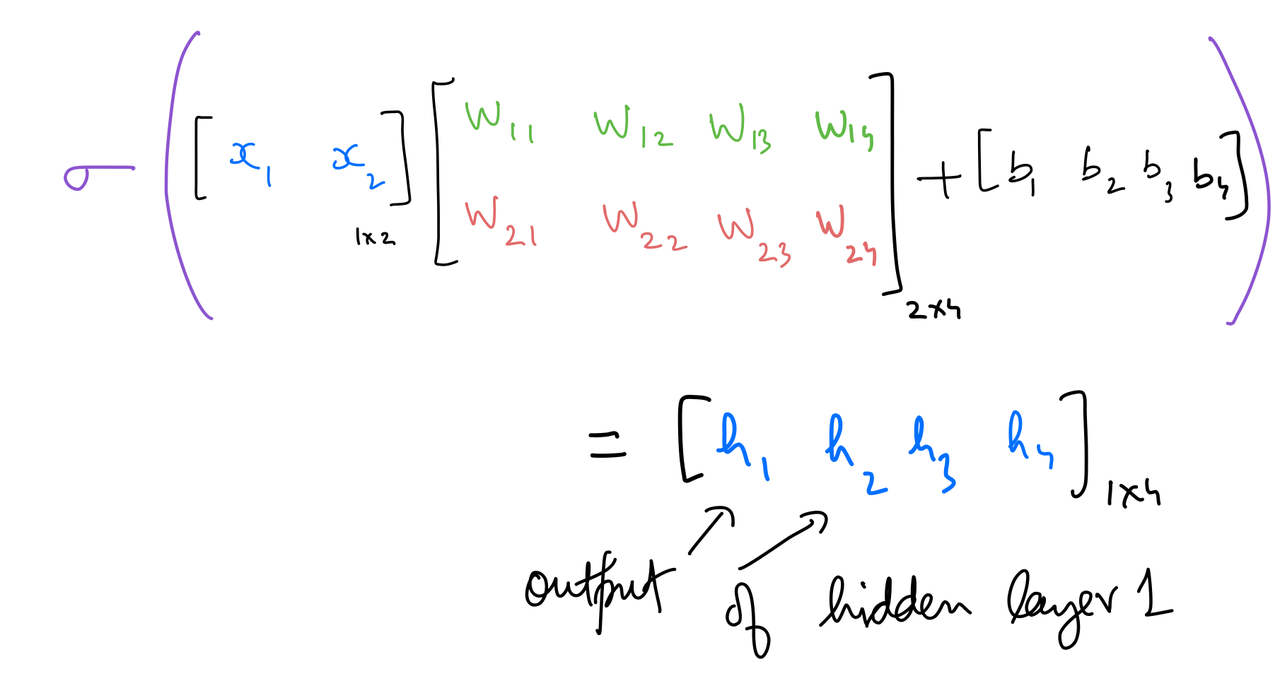
hidden_layer_1_in = np.dot(input_x,weights_input_to_hidden_1) + bias_input_to_hidden_1
hidden_layer_1_in.shape
hidden_layer_1_out = sigmoid(hidden_layer_1_in)
hidden_layer_1_out.shape
Hidden 2 out¶
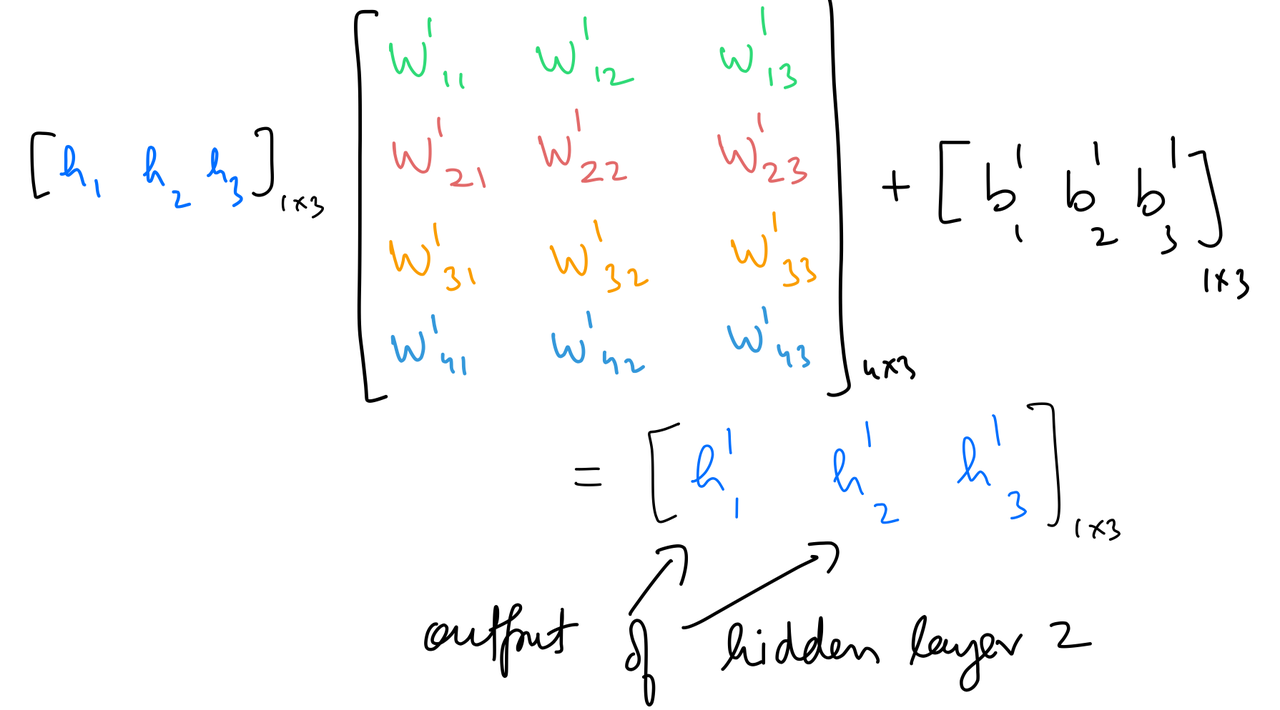
hidden_layer_2_in = np.dot(hidden_layer_1_out,weights_hidden_1_to_hidden_2) + bias_hidden_1_to_hidden_2
hidden_layer_2_in.shape
hidden_layer_2_out = sigmoid(hidden_layer_2_in)
hidden_layer_2_out.shape
Output¶
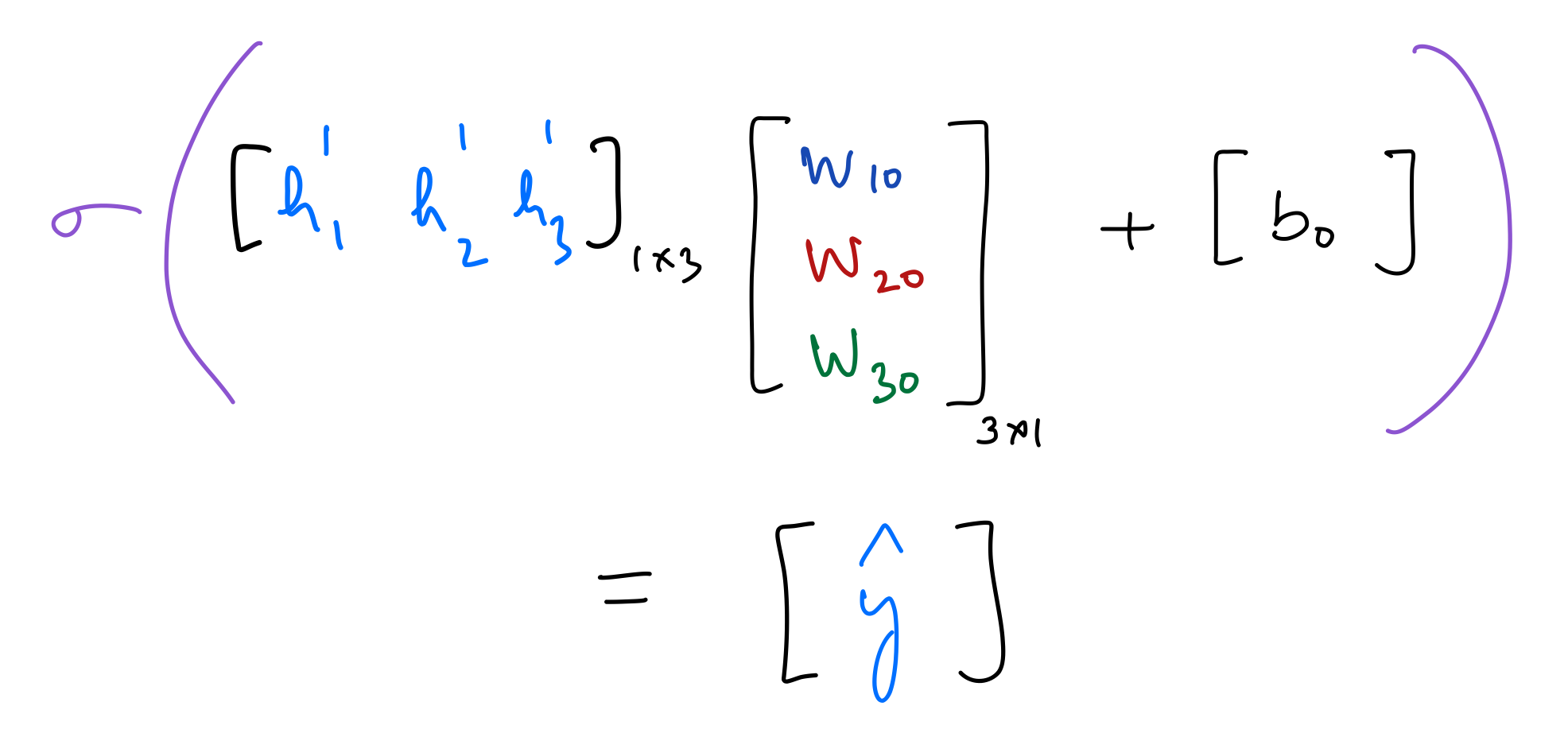
output_layer_in = np.dot(hidden_layer_2_out,weights_hidden_2_to_output) + bias_hidden_2_to_output
output_layer_in.shape
output_layer_out = sigmoid(output_layer_in)
output_layer_out.shape
Error¶
error = (-1)*(output_y*np.log(output_layer_out) + (1-output_y)*np.log(1-output_layer_out))
error
Backpropagation¶
Calculating the partial derivatives wrt. the error.
Partial derivative wrt prediction¶
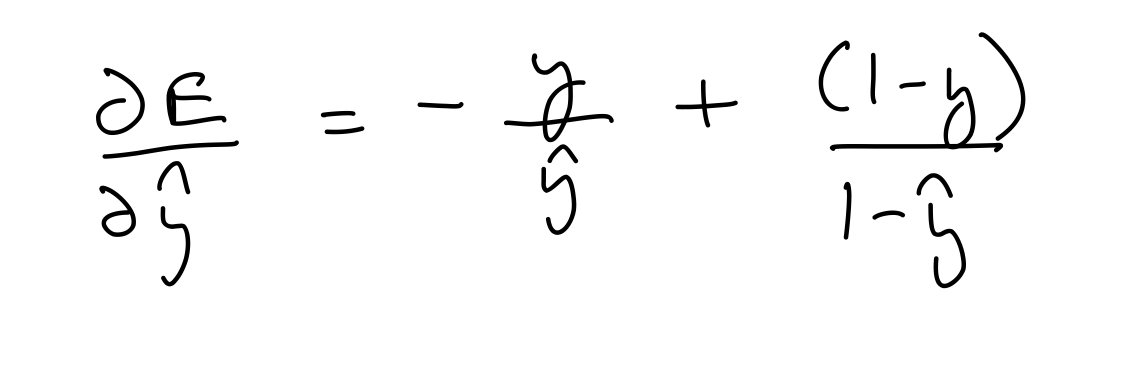
del_y_out = (-1)*output_y/output_layer_out + (1-output_y)/(1-output_layer_out)
assert del_y_out.shape == output_layer_out.shape
del_y_out
Partial derivative wrt hidden layer 2 out¶
del_h_2 = del_y_out*output_layer_out*(1-output_layer_out)*weights_hidden_2_to_output.T
assert del_h_2.shape == hidden_layer_2_out.shape
del_h_2
Partial derivative wrt output layer weights¶
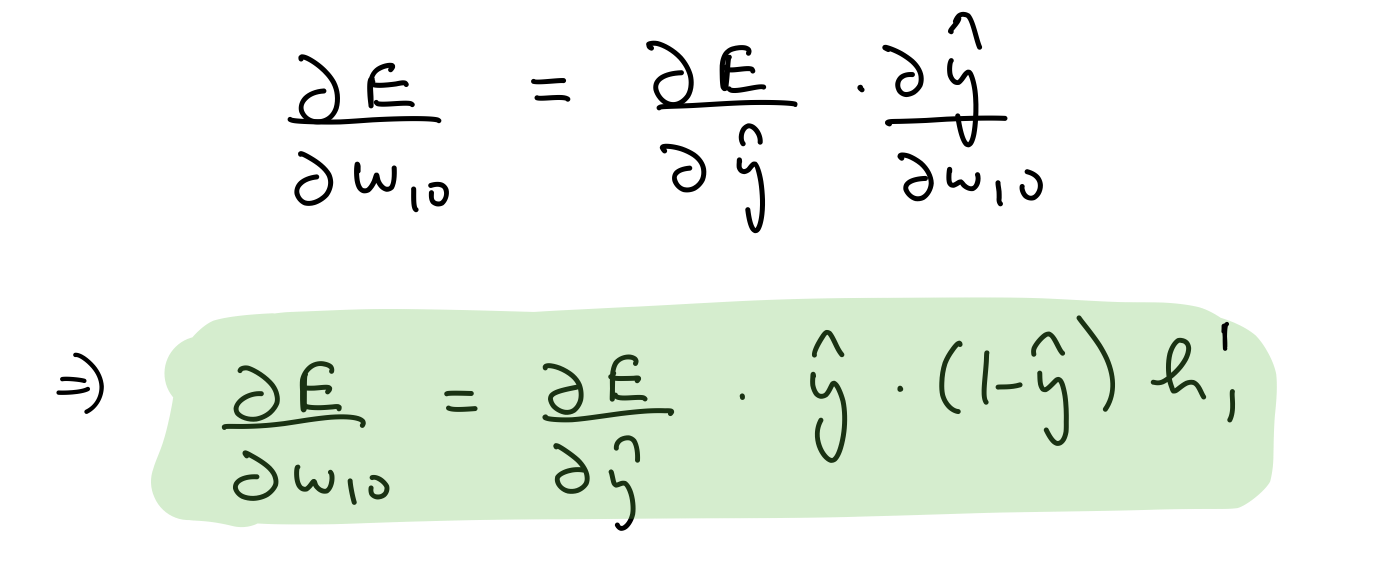
del_w_h_2_o = del_y_out*output_layer_out*(1-output_layer_out)*hidden_layer_2_out.T
assert del_w_h_2_o.shape == weights_hidden_2_to_output.shape
del_w_h_2_o
Partial derivative wrt output layer biases¶
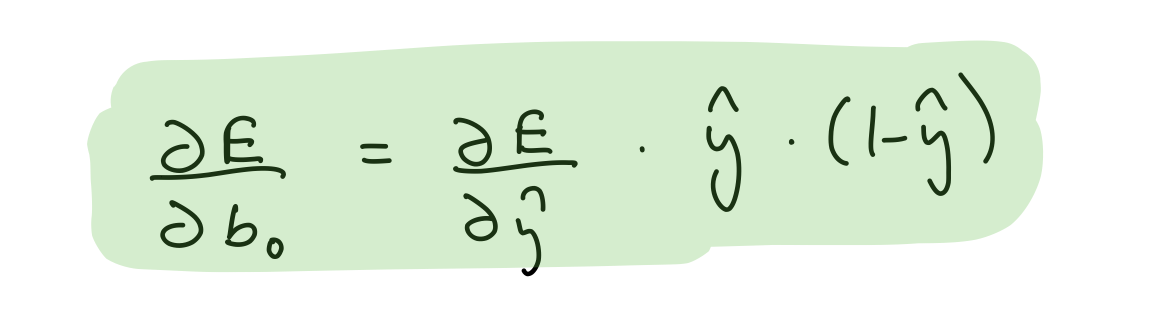
del_b_2_o = (del_y_out*output_layer_out*(1-output_layer_out))[0]
assert del_b_2_o.shape == bias_hidden_2_to_output.shape
del_b_2_o
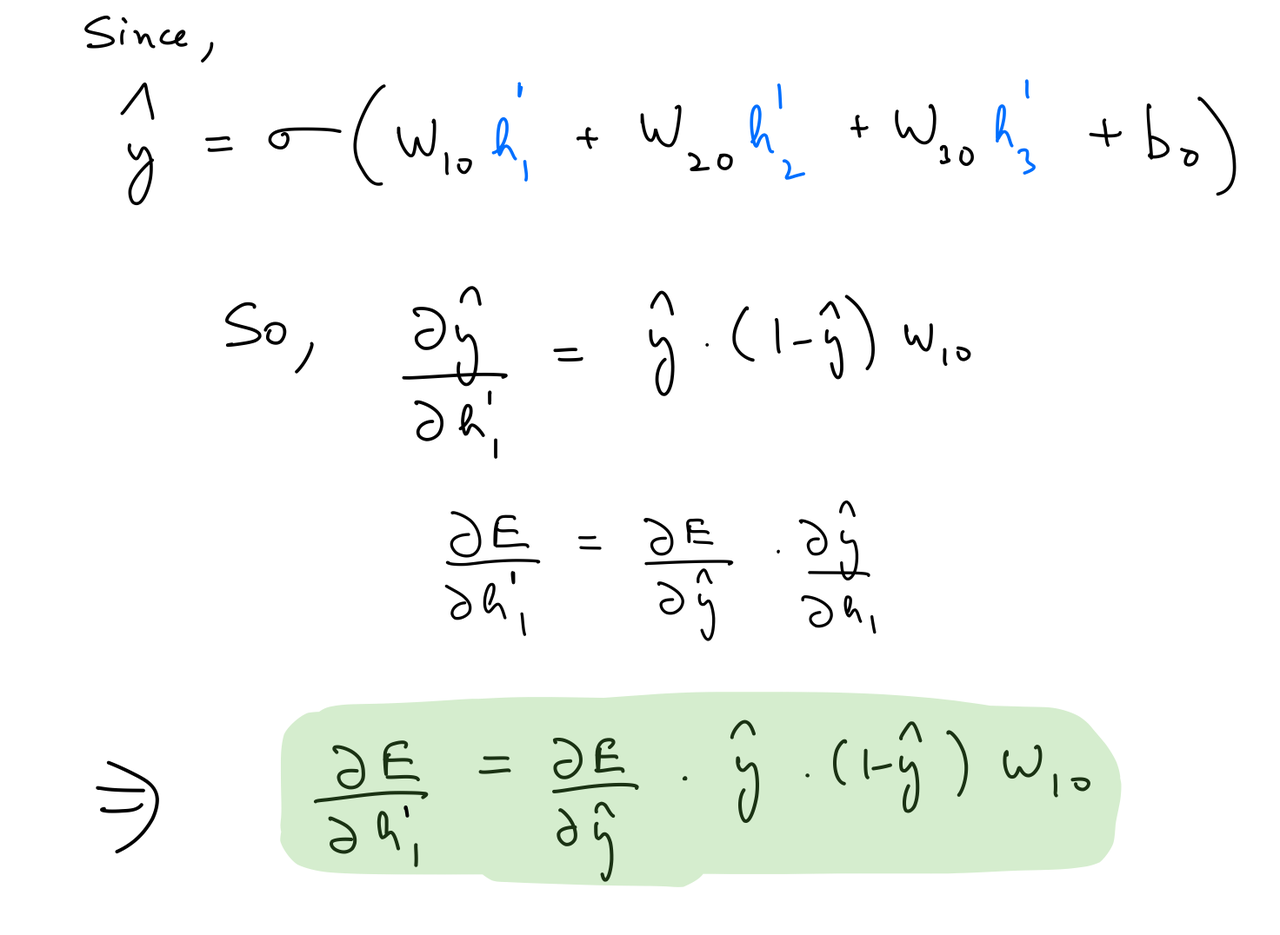
Partial derivative wrt hidden layer 1 out¶
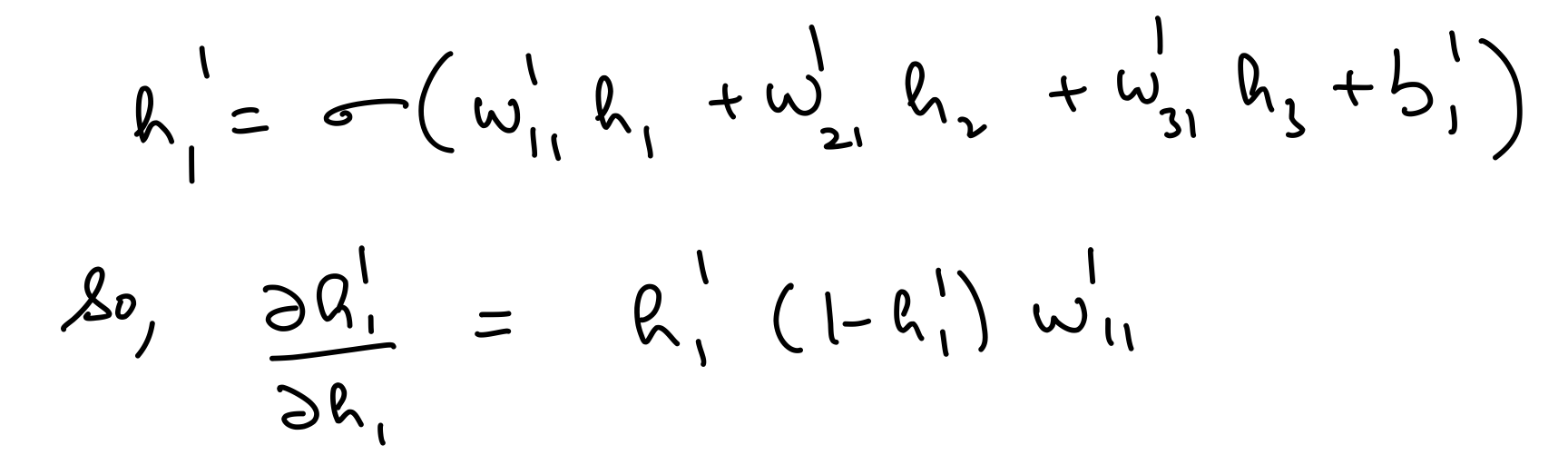
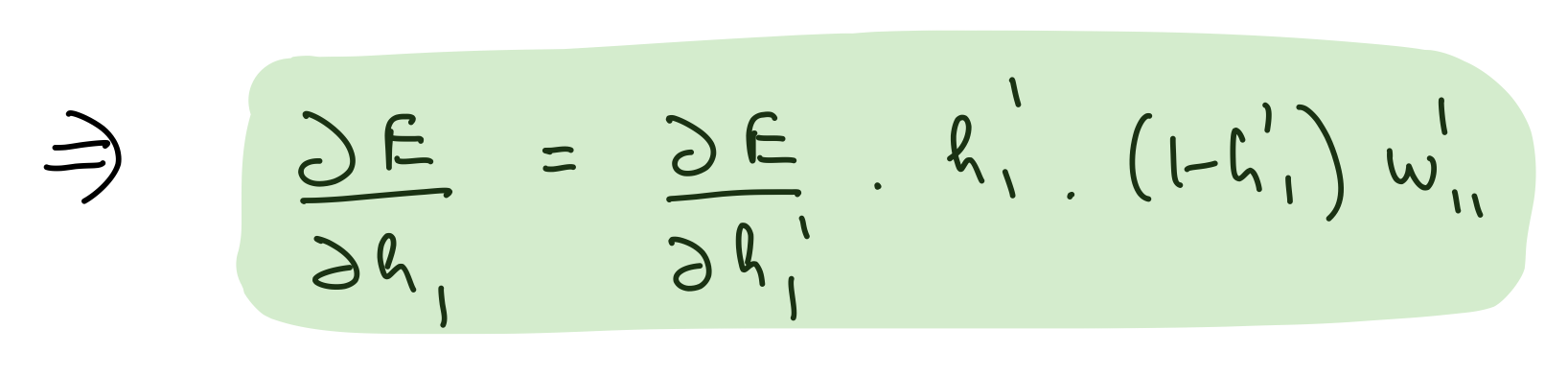
del_h_1 = np.dot(del_h_2*hidden_layer_2_out*(1-hidden_layer_2_out),weights_hidden_1_to_hidden_2.T)
assert del_h_1.shape == hidden_layer_1_out.shape
del_h_1
Partial derivative wrt hidden layer 2 weights¶
del_w_h_1_h_2 = del_h_2*hidden_layer_2_out*(1-hidden_layer_2_out)*hidden_layer_1_out.T
assert del_w_h_1_h_2.shape == weights_hidden_1_to_hidden_2.shape
del_w_h_1_h_2
Partial derivative wrt hidden layer 2 biases¶
del_b_h_1_h_2 = (del_h_2*hidden_layer_2_out*(1-hidden_layer_2_out))[0]
assert del_b_h_1_h_2.shape == bias_hidden_1_to_hidden_2.shape
del_b_h_1_h_2
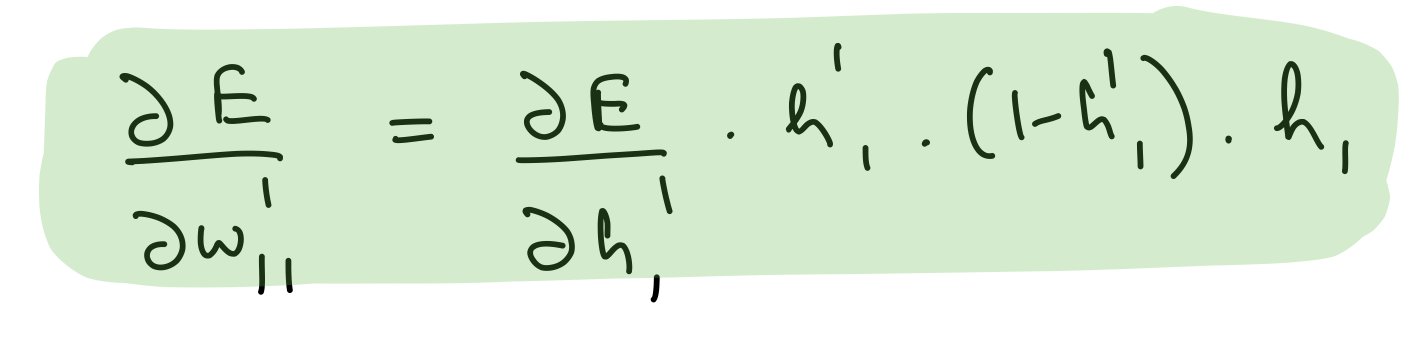
Partial derivative wrt hidden layer 1 weights¶
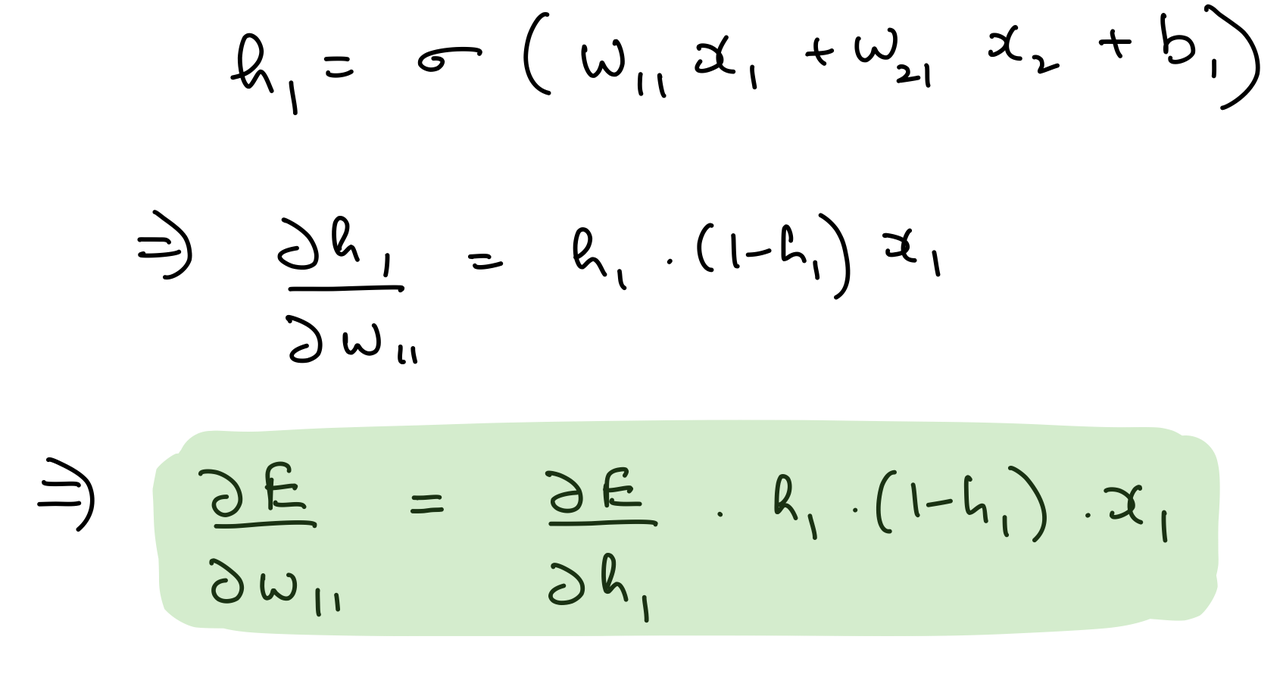
del_w_i_h_1 = del_h_1*hidden_layer_1_out*(1-hidden_layer_1_out)*input_x.T
assert del_w_i_h_1.shape == weights_input_to_hidden_1.shape
del_w_i_h_1
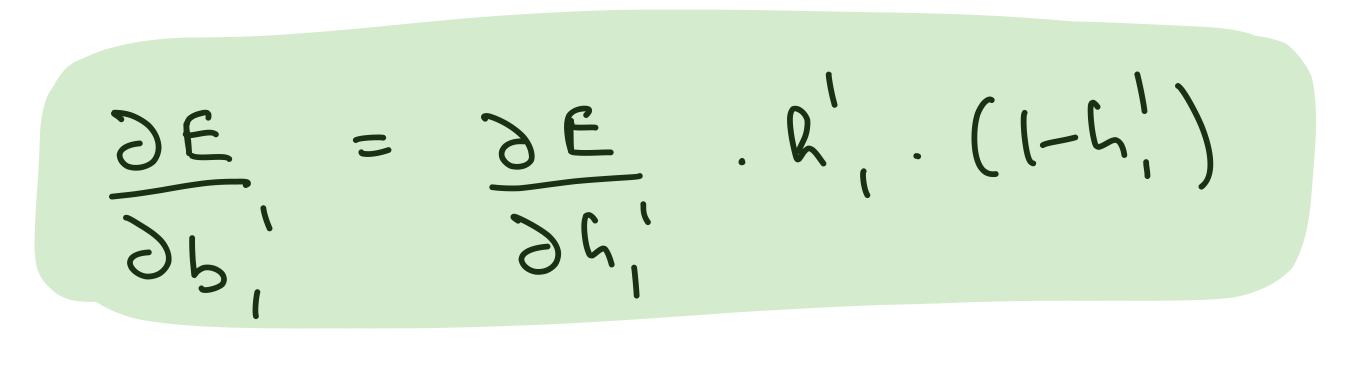
Partial derivative wrt hidden layer 1 biases¶
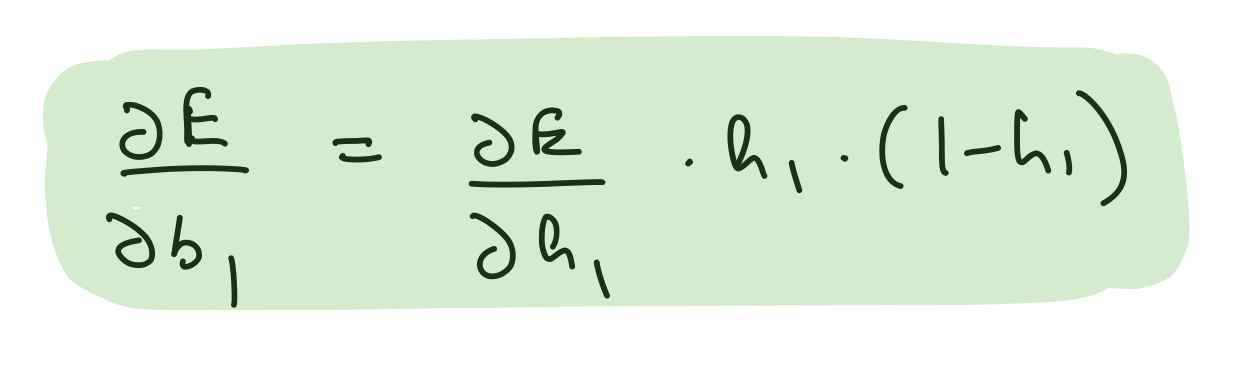
del_b_i_h_1 = (del_h_1*hidden_layer_1_out*(1-hidden_layer_1_out))[0]
assert del_b_i_h_1.shape == bias_input_to_hidden_1.shape
del_b_i_h_1
learn_rate = 1e-3
weights_hidden_2_to_output -= learn_rate*del_w_h_2_o
bias_hidden_2_to_output -= learn_rate*del_b_2_o
weights_hidden_1_to_hidden_2 -= learn_rate*del_w_h_1_h_2
bias_hidden_1_to_hidden_2 -= learn_rate*del_b_h_1_h_2
weights_input_to_hidden_1 -= learn_rate*del_w_i_h_1
bias_input_to_hidden_1 -= learn_rate*del_b_i_h_1
Putting all of this in a single class. I've also added the function get_hidden_layer_outputs to get intermediate activations from the MLP.
class MLPNeuralNet3Layers(object):
def __init__(self,N_input, N_hidden_1, N_hidden_2, N_output):
self.weights_input_to_hidden_1 = np.random.randn(N_input, N_hidden_1)*np.sqrt(1/N_hidden_1)
self.weights_hidden_1_to_hidden_2 = np.random.randn(N_hidden_1, N_hidden_2)*np.sqrt(1/N_hidden_2)
self.weights_hidden_2_to_output = np.random.randn(N_hidden_2, N_output)*np.sqrt(1/N_output)
self.bias_input_to_hidden_1 = np.zeros(N_hidden_1)
self.bias_hidden_1_to_hidden_2 = np.zeros(N_hidden_2)
self.bias_hidden_2_to_output = np.zeros(N_output)
def feed_forward(self,input_x):
self.hidden_layer_1_in = np.dot(input_x,self.weights_input_to_hidden_1) + self.bias_input_to_hidden_1
self.hidden_layer_1_out = sigmoid(self.hidden_layer_1_in)
self.hidden_layer_2_in = np.dot(self.hidden_layer_1_out,self.weights_hidden_1_to_hidden_2) + self.bias_hidden_1_to_hidden_2
self.hidden_layer_2_out = sigmoid(self.hidden_layer_2_in)
self.output_layer_in = np.dot(self.hidden_layer_2_out,self.weights_hidden_2_to_output) + self.bias_hidden_2_to_output
self.output_layer_out = sigmoid(self.output_layer_in)
return self.output_layer_out
def get_hidden_layer_outputs(self,input_x):
self.hidden_layer_1_in = np.dot(input_x,self.weights_input_to_hidden_1) + self.bias_input_to_hidden_1
self.hidden_layer_1_out = sigmoid(self.hidden_layer_1_in)
self.hidden_layer_2_in = np.dot(self.hidden_layer_1_out,self.weights_hidden_1_to_hidden_2) + self.bias_hidden_1_to_hidden_2
return (self.hidden_layer_1_in,self.hidden_layer_2_in)
def back_propagate(self,input_x,output_y, learn_rate):
error = (-1)*(output_y*np.log(self.output_layer_out) + (1-output_y)*np.log(1-self.output_layer_out))
del_y_out = (-1)*output_y/self.output_layer_out + (1-output_y)/(1-self.output_layer_out)
del_h_2 = del_y_out*self.output_layer_out*(1-self.output_layer_out)*self.weights_hidden_2_to_output.T
del_w_h_2_o = del_y_out*self.output_layer_out*(1-self.output_layer_out)*self.hidden_layer_2_out.T
del_b_2_o = (del_y_out*self.output_layer_out*(1-self.output_layer_out))[0]
del_h_1 = np.dot(del_h_2*self.hidden_layer_2_out*(1-self.hidden_layer_2_out),self.weights_hidden_1_to_hidden_2.T)
del_w_h_1_h_2 = del_h_2*self.hidden_layer_2_out*(1-self.hidden_layer_2_out)*self.hidden_layer_1_out.T
del_b_h_1_h_2 = (del_h_2*self.hidden_layer_2_out*(1-self.hidden_layer_2_out))[0]
del_w_i_h_1 = del_h_1*self.hidden_layer_1_out*(1-self.hidden_layer_1_out)*input_x.T
del_b_i_h_1 = (del_h_1*self.hidden_layer_1_out*(1-self.hidden_layer_1_out))[0]
self.weights_hidden_2_to_output -= learn_rate*del_w_h_2_o
self.bias_hidden_2_to_output -= learn_rate*del_b_2_o
self.weights_hidden_1_to_hidden_2 -= learn_rate*del_w_h_1_h_2
self.bias_hidden_1_to_hidden_2 -= learn_rate*del_b_h_1_h_2
self.weights_input_to_hidden_1 -= learn_rate*del_w_i_h_1
self.bias_input_to_hidden_1 -= learn_rate*del_b_i_h_1
return error
Decision Boundaries¶
Let's train this MLP and see the evolution of decision boundaries of the MLP itself, as well as the constituent neurons. We can use the same train function from before.
def create_decision_boundary_anim(nn,X,y,epochs=300,learn_rate=1e-3,snap_every=100,dpi=100,print_error=False, num_cols=2):
hidden_layer_1_units = nn.weights_hidden_1_to_hidden_2.shape[0]
hidden_layer_2_units = nn.weights_hidden_2_to_output.shape[0]
num_subplots = 1 + hidden_layer_1_units + hidden_layer_2_units
num_rows = ceil(num_subplots/num_cols)
fig,axes = plt.subplots(num_rows, num_cols, figsize=(num_cols*3,num_rows*3),dpi=dpi)
axes_list = list(axes.flat)
for ax in axes.flat:
ax.set_yticklabels([])
ax.set_xticklabels([])
ax.get_xaxis().set_visible(False)
ax.get_yaxis().set_visible(False)
final_dec_boundary_ax = axes_list[0]
hidden_layer_1_ax = axes_list[1:hidden_layer_1_units+1]
hidden_layer_2_ax = axes_list[hidden_layer_1_units+1:hidden_layer_1_units+1+hidden_layer_2_units]
camera = Camera(fig)
h = .02
extra_space = 0.5
x_min, x_max = X[:, 0].min() - extra_space, X[:, 0].max() + extra_space
y_min, y_max = X[:, 1].min() - extra_space, X[:, 1].max() + extra_space
xx, yy = np.meshgrid(np.arange(x_min, x_max, h),
np.arange(y_min, y_max, h))
for e in range(ceil(epochs/snap_every)):
train(nn,X,y,snap_every,learn_rate,print_error=print_error)
Z = (nn.feed_forward(np.c_[xx.ravel(), yy.ravel()]) >0.5).astype(int)
Z = Z.reshape(xx.shape)
final_dec_boundary_ax.contourf(xx, yy, Z, cmap=plt.cm.RdBu)
text_box = AnchoredText(f'Epoch: {snap_every*(e+1)}', frameon=True, loc=4, pad=0.5)
plt.setp(text_box.patch, facecolor='white', alpha=0.5)
final_dec_boundary_ax.add_artist(text_box)
Z_hidden_1, Z_hidden_2 = nn.get_hidden_layer_outputs(np.c_[xx.ravel(), yy.ravel()])
Z_hidden_1 = (Z_hidden_1 >=0.).astype(int)
Z_hidden_2 = (Z_hidden_2 >=0.).astype(int)
for i,ax in enumerate(hidden_layer_1_ax):
Z_ = Z_hidden_1[:,i].reshape(-1,1)
Z_ = Z_.reshape(xx.shape)
ax.contourf(xx, yy, Z_, cmap=plt.cm.RdBu)
for i,ax in enumerate(hidden_layer_2_ax):
Z_ = Z_hidden_2[:,i].reshape(-1,1)
Z_ = Z_.reshape(xx.shape)
ax.contourf(xx, yy, Z_, cmap=plt.cm.RdBu)
camera.snap()
final_dec_boundary_ax = plot_points_on_ax(final_dec_boundary_ax,X, y,alpha=.6)
final_dec_boundary_ax.set_title(f'Decision boundary of MLP')
for i,ax in enumerate(hidden_layer_1_ax):
ax = plot_points_on_ax(ax,X, y,alpha=.6)
ax.set_title(f'Hidden layer 1 neuron {i+1}')
for i,ax in enumerate(hidden_layer_2_ax):
ax = plot_points_on_ax(ax,X, y,alpha=.6)
ax.set_title(f'Hidden layer 2 neuron {i+1}')
plt.annotate('https://dhruvs.space', xy=(1, 0), xycoords='axes fraction', fontsize=9,
xytext=(0, -15), textcoords='offset points',
ha='right', va='top')
plt.tight_layout()
animation = camera.animate()
return animation
np.random.seed(30)
nn = MLPNeuralNet3Layers(2, 4, 3, 1)
anim = create_decision_boundary_anim(nn,X,y,\
epochs=400,dpi=100,\
learn_rate=1e-2,snap_every=10,\
print_error=False)
plt.close()
HTML(anim.to_html5_video())

It works! As expected, neurons in the first hidden layer learn to create linear DBs, while the neurons in the second hidden layer have learnt to create non-linear ones. The activations from all 7 neurons play a role in coming up with the final DB of the MLP.
This is the fundamental advantage of stacking up neurons in the form of layers — successive hidden layers create increasingly complex decision boundaries.
Let's see the results on a few more datasets.
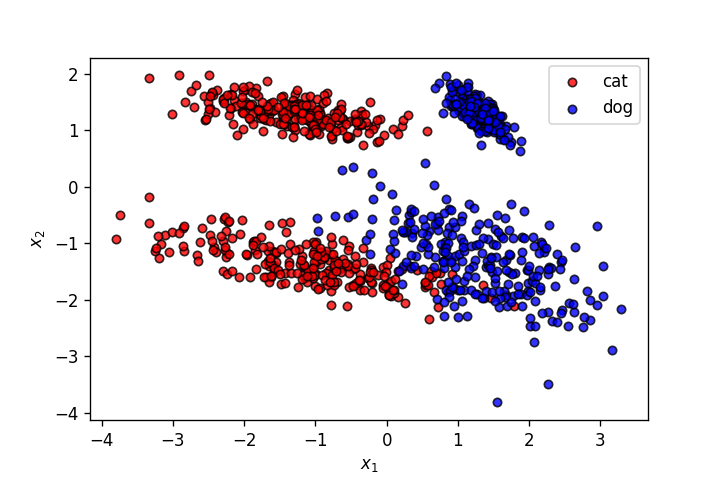
X,y = make_classification(n_samples=1000, n_features=2, n_informative=2,
n_redundant=0, n_repeated=0, n_classes=2, n_clusters_per_class=2,
class_sep=1.,
flip_y=0,weights=[0.5,0.5], random_state=902)
fig = plt.figure(dpi=120)
plot_points(X,y,alpha=.8)
plt.savefig('2.png')
np.random.seed(30)
nn = MLPNeuralNet3Layers(2, 3, 2, 1)
anim = create_decision_boundary_anim(nn,X,y,\
epochs=600,dpi=100,\
learn_rate=1e-2,snap_every=25,\
print_error=True,
num_cols=3)
plt.close()
HTML(anim.to_html5_video())

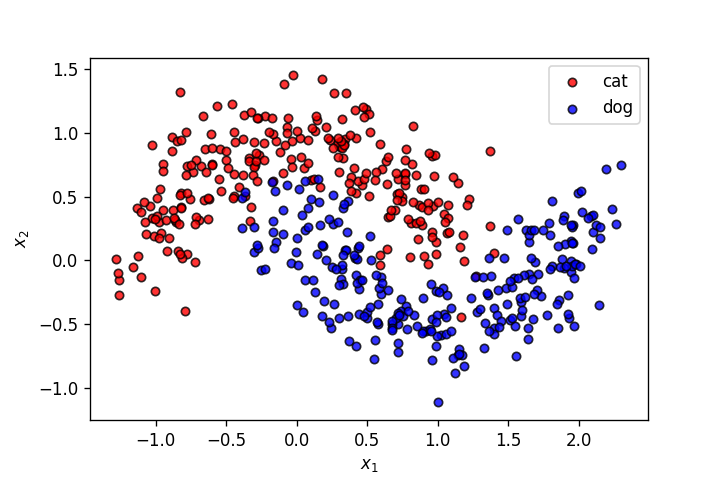
X,y = make_moons(n_samples=500, shuffle=True, noise=.2, random_state=0)
fig = plt.figure(dpi=120)
plot_points(X,y,alpha=.8)
plt.savefig('3.png')
np.random.seed(30)
nn = MLPNeuralNet3Layers(2, 3, 2, 1)
anim = create_decision_boundary_anim(nn,X,y,\
epochs=300,dpi=100,\
learn_rate=5e-2,snap_every=10,\
print_error=True,
num_cols=3)
plt.close()
HTML(anim.to_html5_video())

X,y = make_classification(n_samples=1000, n_features=2, n_informative=2,
n_redundant=0, n_repeated=0, n_classes=2, n_clusters_per_class=2,
class_sep=1.3,
flip_y=0,weights=[0.5,0.5], random_state=910)
fig = plt.figure(dpi=120)
plot_points(X,y,alpha=.8)
plt.savefig('4.png')
np.random.seed(30)
nn = MLPNeuralNet3Layers(2, 3, 2, 1)
anim = create_decision_boundary_anim(nn,X,y,\
epochs=450,dpi=100,\
learn_rate=5e-3,snap_every=10,\
print_error=True,\
num_cols=3)
plt.close()
HTML(anim.to_html5_video())

This exercise was geared more towards implementation than theory, but served as a good deep dive into understanding why adding layers to neural networks works.